数码管由于发光亮度强,指示效果好,非常适合于电梯楼层等数值显示应用中。对于一位数码管,可以采用静态显示,但实际应用中都是需要显示多位数值,数码管模块也只能动态显示,因此笔者在这里简单分析一下数码管动态扫描驱动的实现。
1. 数码管原理概述
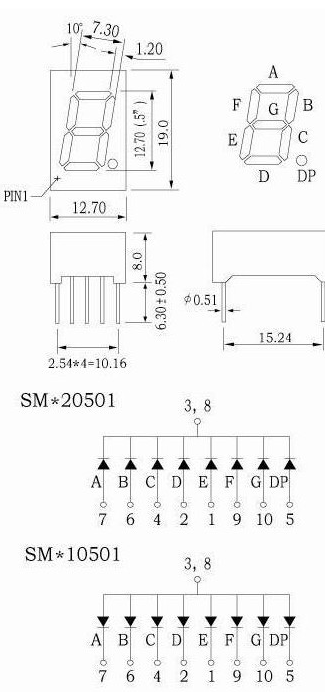
数码管由多个发光二极管封装在一起组成“8”字型的器件,引线已在内部连接完成,只引出它们的各个笔划,公共电极。数码管实际上是由七个发光管组成8字形构成的,加上小数点就是8个。这些段分别由字母a,b,c,d,e,f,g,dp来表示。数码管根据内部接法又可分成共阳极数码管和共阴极数码管。共阳数码管是指将所有发光二极管的阳极接到一起形成公共阳极(COM)的数码管(如下图SM*10501),共阴数码管是指将所有发光二极管的阴极接到一起形成公共阴极(COM)的数码管如下图(SM*20501)。以共阳数码管为例,要想显示数字2,需把A、B、G、E、D段点亮,即公共端接上正电源,ABGED段阴极拉低,其余段拉高即可显示数字2。
2. 硬件设计
笔者此处以四位一体共阳数码管显示为例讲解其大概的硬件设计。
微控制器的IO口均不能流过过大的电流,LED点亮时有约10ms的电流,因此数码管的段码输出不要直接接单片机IO口,应先经过一个缓冲器74HC573。单片机IO口只需很小的电流控制74HC573即可间接的控制数码管段的显示,而74HC573输出也能负载约10ms的电流。设置数码管段的驱动电流为ID=15ma,这个电流点亮度好,并且有一定的裕度,即使电源输出电压偏高也不会烧毁LED,限流电阻值R = (VCC- VCE– VOL– VLED) / ID
VCC为5v供电,VCE为三极管C、E间饱和电压,估为0.2v, VOL为74hc573输出低电平时电压,不同灌电流,此值不一样,估为0.2v,具体查看规格书,VLED为红光驱动电压,估为1.7v,根据上式可算出限流电阻为R = 200R。
数码管需接收逐个扫描信号,扫描到相应数码管时,对应的段码数据有效,即显示这个数码管的数值。笔者采用三线八线译码器74HC138来产生对应的扫描线信号。
当各个段码均点亮时,电流约15max8=90ma流过数码管公共端,74HC138无法直接驱动这个电流,需加三极管驱动,由于74HC138输出低电平有效,此处只有PNP三极管适合作为驱动。三极管基极电流设为2ma即可让三极管饱和,最大驱动电流远大于90ma。基极偏置电阻阻值
Rb=(VCC- VEB– VOL) / IB
VCC为5v供电,VEB为三极管E、B间的导通电压0.7v,VOL为74hc138输出低电平时电压,可根据规格书估为0.3v,故Rb= 2k即可。
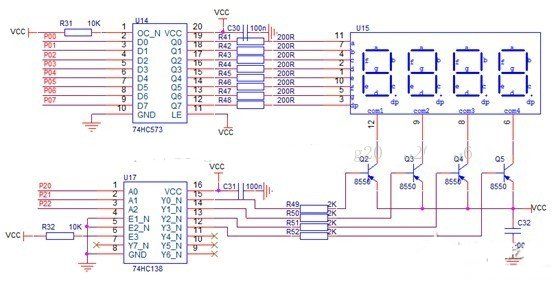
图2-1 四位一体数码管原理图
3. 驱动实现
数码管段码接P0口,位码接P2口第0~2位。对于LED显示器都是有一个刷新频率的,同样对于数码码动态扫描也需要一个扫描频率。扫描频率下限为50HZ,低于一定的扫描频率,显示会闪烁。频率过高,则亮度较差且占用cpu资源。一般整个数码管扫描一遍时间为约10ms较合适(即扫描频率100HZ),我们用的是四位数码管,每个数码管点亮时间为2ms,扫描一遍时间为8ms。为保证这个刷新频率,通过是通过定时器来周期性进行数码管刷新。笔者在此以四位一体数码管实现秒表计数显示为例来作代码开发。
数码管动态显示功能实现模块文件DigitalTubeTable.c内容如下:
#include “reg52.h”
#include“DigitalTube.h”
// 数值相对应的段码,共阳极
static unsigned char codeDigitalTubeTable[12]= { // 共阳LED段码表
0xc0, 0xf9, 0xa4, 0xb0, 0x99,0x92, 0x82, 0xf8, 0x80, 0x90, 0xff, 0xbf
//“0” “1” “2” “3” “4” “5” “6” “7” “8” “9” “不亮” “-”
};
// 每个数码管需一个字节的内存保存对应数码管数据
staTIc unsigned charFrameBuffer[DigitalTubeNumber];
unsigned char*DigitalTube_GetBuffer()
{
return FrameBuffer;
}
void DigitalTube_Scan()
{
staTIc unsigned char Select = 0; // 记录扫描的选择线
unsigned char Code;
// 从对应选择线中找到显存数据,并得到相应的段码
Code = DigitalTubeTable[FrameBuffer[Select]];
// 段码实际输出到数码管接口
DigitalTube_Data(Code);
// 位选实际输出到数码管接口
DigitalTube_Select(Select);
Select++; // 进入到下一位选扫描
if (Select 》= DigitalTubeNumber) {
Select = 0; // 所有数码管已扫描,从第一个数码管再次开始扫描
}
}
我们在数码管模块头文件DigitalTube.h中实现模块的接口访问宏实现,使之方便移植及修改接口配置。模块头文件同时也引出模块的接口函数,void DigitalTube_Scan(void)为数码管刷新函数,需周期性调用刷新数码管显示。unsigned char *DigitalTube_GetBuffer(void)用来获得数码管显存,从而更新数码管显存数据。其内容如下:
#ifndef __DigitalTube_H__
#define __DigitalTube_H__
#ifdef __cplusplus
extern “C” {
#endif
// 数码管模块中的个数,最大为8
#define DigitalTubeNumber 4
// 输出数码管位选
#defineDigitalTube_Select(Select) {P2 = (P2&0xf8) + (Select);}
// 输出数码管段码
#define DigitalTube_Data(Dat) {P0 =(Dat);}
// 数码管刷新函数,必须保证以一定周期调用刷新
void DigitalTube_Scan(void);
// 获得数码管显存,以作显示的数据更新
unsigned char*DigitalTube_GetBuffer(void);
#ifdef __cplusplus
}
#endif
#endif /*__DigitalTube_H__*/
外部模块通过引入数码管的模块头文件DigitalTube.h来实现调用数码管驱动函数,简单测试调用(秒表数码管显示计数)实现如下:
#include“reg52.h”
#include“DigitalTube.h”
// 以定时器时间为计时标准,记录时间间隔
staTIc volaTIle unsignedint SystemTick = 0;
// 定时器2ms中断处理进行数码管刷新
void T0_Interrupt()interrupt 1
{
TH0 = (65536-2000) / 256;
TL0 = (65536-2000) % 256;
SystemTick++; // 记录时间间隔
DigitalTube_Scan(); //刷新数码管
}
void T0_Init()
{
TMOD = 0x01; // 定时器0工作方式1
// 2ms计时中断(12M)
TH0 = (65536-2000) / 256;
TL0 = (65536-2000) % 256;
ET0 = 1; // 定时器T0中断允许
EA = 1; // 总中断允许
}
void main()
{
unsigned char *pBuffer;
unsigned char i;
// 定时器初始化
T0_Init();
// 获得数码管显存,以作更新数据显示
pBuffer = DigitalTube_GetBuffer();
// 数据管显存初始化显示0
for (i=0; i
pBuffer[i] = 0;
}
// 开启定时器进行计时以及数码管刷新
TR0 = 1;
while(1) {
// SystemTick读数到500时为1s间隔到
if (SystemTick 》 500) {
SystemTick =0; // 重新计秒
// 更新数码管秒表计数显存
for (i=0; i
pBuffer[DigitalTubeNumber-1-i]++;
if (pBuffer[DigitalTubeNumber-1-i] 《10) {
break; // 未到10,不用进位更新高位显存,退出
} else {