引 言
用于晶闸管三相全控桥整流装置的触发电路,若仅从触发信号的相位控制方式来看,只有多通道相位控制和单通道相位控制两种。前者的典型电路为锯齿波移相触发电路,它用于三相全控桥式主电路时,移相通道多达6个,由于各个通道中同步电路本身特性的差异,发出的触发脉冲相位对称度很差。另外,传统的晶闸管整流或逆变系统需要3个同步变压器来得到触发脉冲的同步信号,不仅增加了系统的成本,同时给安装调试带来不便。随着新型器件的发展,数字移相技术逐渐开始取代传统的模拟移相技术。AVR单片机具有强大的逻辑分析和计算能力,而且可以在系统编程,可靠性很高。
本文详细介绍了一种以AVR单片机为核心,并且不需同步变压器、具有相序自适应功能的双脉冲序列数字移相触发器设计。现场应用证明,该相控数字触发电路简单可靠,产生的脉冲对称性好,抗干扰能力强。
1 三相半控桥的触发原理
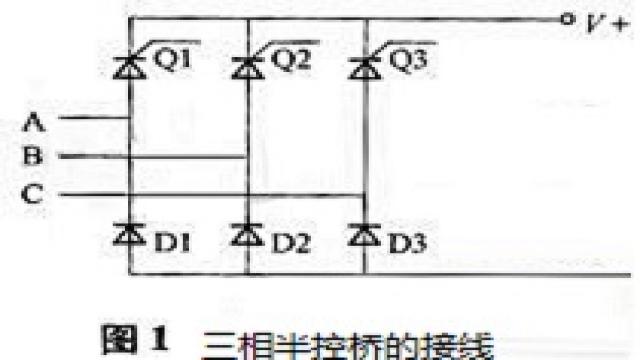
在三相桥式半控整流电路中,每个导电回路中有2个晶闸管,见图1。
该电路由一个三相半波不控整流电路与一个三相半波可控整流串联而成,因此兼有可控与不可控两者的特点。共阳极组的整流二极管总是在自然换相点换流,使电流换到阴极电位低的一相上去;而共阴极组的3个晶闸管则要触发后才能换到阳极电位更高的一相中去。输出整流电压Ud的波形是两组整流电压波形之和,改变可控组的控制角α可得到0~2.34U2的可调输出平均电压Ud。
2 装置的工作原理
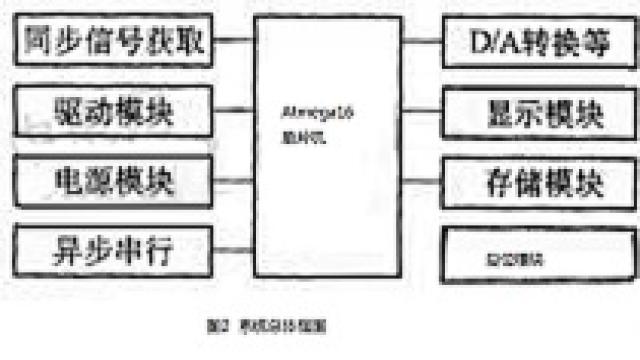
2.1系统总体结构
系统总体框图见图2。
2.2同步信号的获取
在三相半控整流电路中,选择触发电路的同步电源非常重要,只有正确地选择了同步电源,才能使各晶闸管在指定的时刻及时依次顺序触发导通。同步电源的选择与3个因素有关:整流电路形式及整流变压器绕组的接法;同步变压器绕组的接法;触发电路中同步电源电压的相位与触发脉冲的相位之间的关系。
为了得到触发脉冲的移相角,即确定触发脉冲相对于输入电压的位置,必须从三相交流电源引入同步信号。传统的做法是从电源侧通过3个变压器得到各相的同步信号,这样就增加了系统的成本,并且安装也不方便。采用如图3所示的方法,将三相线电压信号,经过限流电阻,使用光耦进行电压隔离,这样就不需要同步变压器,线路简单,同时节省了成本。
同步信号获取电路如图3所示。
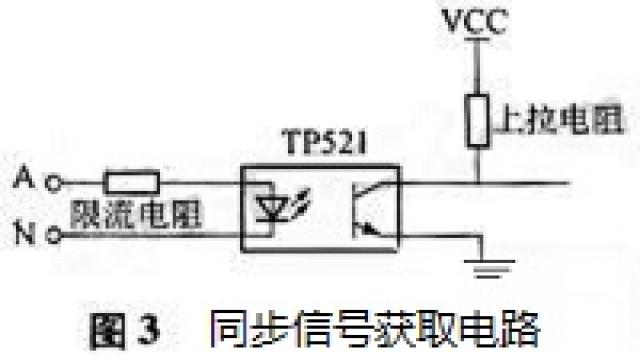
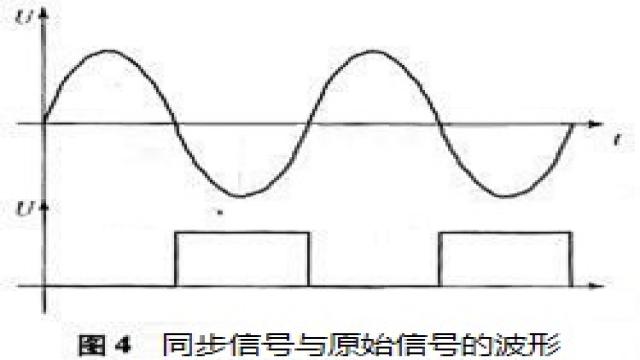
在正弦交流电压信号的正半周,发光二极管导通,光耦输出低电平,在负半周输出高电平。光耦输出信号的下降沿就是同步信号的正过零时刻。但是,这一时刻会有一点延时,这个问题将在3.2节中讨论。波形图见图4。
2.3同步工作原理
在工频为50 Hz时,电源1个周期理论上应为:T=1/50=0.02s=20ms。因此,系统初始化时T=20 ms。实际应用中,由于电网负荷的变化,经常出现周期不严格等于20 ms的情况。如果不相应调整T值的话,就会产生触发误差。定义16位的定时器T1工作在系统时钟频率的1/8(即1μs,最大计时为65.5 ms),用计数器1计时两个下降沿之间的时间就是周期T。这样就消除了电网频率不稳造成的触发误差。
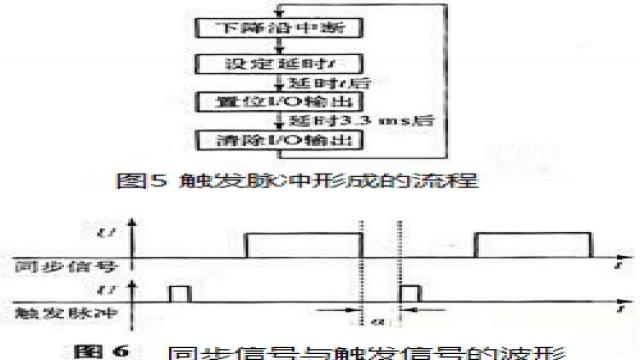
2.4可控硅触发脉冲的形成
Atmega16有3个外部中断,不需要扩展中断就可以做到3个同步信号的获取。定义单片机的中断为下降沿有效,中断一来,延时指定的时间t后就在指定的I/O口输出一个高电平,经过1 ms输出低电平。流程见图5。各相中断信号互为独立。
图6所示为同步信号与触发信号波形。
3 触发延时时间与电压的关系
3.1触发角与输出电压的关系α
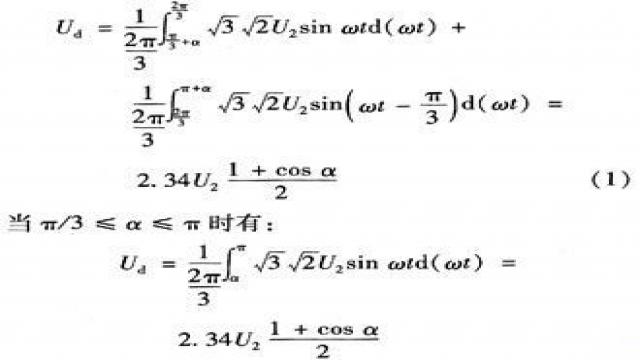
三相半控整流负载R上得的是脉动频率为3倍电源频率的脉动直流电压,在一个脉动周期中,它由一个缺角波形和一个完整波形组成。当α=π/3时,Ud波形只剩下3个波头,波形刚好与α<π/3时的波形维持连续。于是可得当整流输出电压连续时(即带电阻负载0≤α≤π/3时)的平均值为:
3.2触发角α与延时时间的关系
设工频电源1个周期T,理论上应为20 ms,但是,由于电网负荷的变化,经常出现周期不严格等于20 ms的情况。延时时间t与触发角的关系为:
![]()
可见,电网的频率变化时,要输出α的触发角,延时时间也要相应调整。本装置充分考虑了因周期变化引起的触发角的误差,单片机测量上一个周波的周期,作为这个周波的周期。从式(3)也可以看出当电网电压周期稳定时,延时的时间与触发角成正比关系。
3.3延时时间数据的来源
可以根据需要获取模拟数据或者数字数据,本装置提供3种类型的数据接口。
1)模拟电压输入
Atmega16单片机性价比高,有8路10位A/D转换器,从通道0输入0~5 V电压,对应180°~0°的相位角,也可以接个可调电阻调节0~5 V的电压来改变相位角。在有些场合,需要三相触发相位不相同,也可以通过改变跳线选择3组模拟量输入,通道0到通道2分别对应A、B、C三相的移相的相位角。
2)脉冲信号输入
在需要现场隔离的场合,脉冲信号只需要一路数字量隔离就可以将模拟信号传输出去。单片机通过检测输入信号的占空比来确定移相的相位角。100%对应0°,0%对应180°。同上,也可以分别输入3个脉冲信号来分别控制三相的触发角。
3)异步串行数据输入
在工业控制场合,大量使用RS-485总线,本装置可以通过异步串行口将移相的相位角的数据送入单片机。
3.4线性化输出电压
从式(1)和式(2)可以看出,三相半控桥式整流的输入电压与输出电压不是线性关系。单片机有强大的计算能力,通过将输入的模拟数据经过计算,转换到另外一个角度值,可以做到输出电压与输入电压成线性关系。输入信号与输出电压的数学模型如图7所示。

如果将输出的直流电压引入单片机的A/D转换器,将大大增加装置的成本,将高压信号引到主电路中也比较危险,器件容易损坏,调试也不方便。所以,这个系统为一个开环系统,控制的输出不一定与输入电压成比例关系,有一点静态误差。但是可以加入一个非线性变换,通过调整,做到输出电压与输入电压成线性关系。
3.5误差分析
前面提到过,在获取正向过零时会有误差,即得到的不是正向过零时刻。如图8所示。
发光二极管导通需要一定的电流,在刚正向过零的一小段时间内,发光二极管还没能够导通,当电压达到一定电压值时才导通,在接近负过零的一小段时间内,电流过小,也不导通了,在负半周,由于二极管向,也不导通。用示波器测得,同步信号的占空比为54%,可见,下降沿不是过零点。
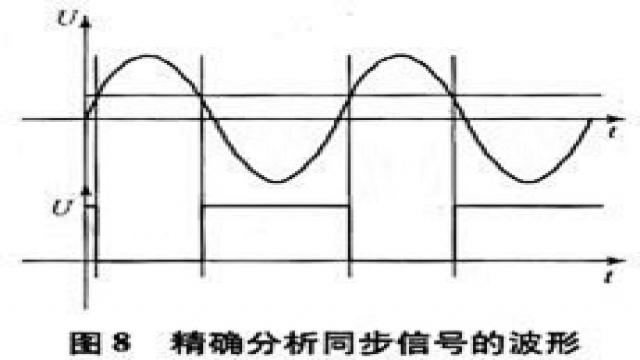
同步信号有误差并不是一点意义也没有,通过分析有误差的同步信号,同样也可以找到过零点。从测量到的数据分析,高电平比低电平多8%,说明二极管有28.8°的时间是因为电流过小而不能够导通。那么,正向过零点应该在下降沿超前14.4°。
在计算触发时间时必须考虑这个下降沿的滞后角。
由于这个滞后角的存在,不能够移相0°~180°,对于单相触发会有误区,对于三相桥式整流来说就没有。因为,线电压过零点滞后相电压过零点30°,而下降沿的滞后角一般小于30°。
4 装置的测试
接好三相电源,负载为2只耐压220 V的白炽灯串联。通过调节A/D输入口的精密可调电阻来改变输入电压,可以做到0~5 V的模拟量的输入。调节电阻,灯泡的亮度改变,可知线路工作正常,用AVR单片机设计的电路可以代替TC787等芯片制作的触发电路。
以下为A/D口的电压与输出的直流电压的关系:
![]()
式中:VADC为A/D转换后的电压;Vin为被选中的A/D引脚的输入电压;Vref为参考电压。
从以上数据可以看出输出电压与输入电压成线性关系。
5 系统的应用
采用单片机来控制可控硅的触发,是可控硅应用的发展趋势。本系统在实际应用中也已显示出触发精度高、可靠性高、易于调试、操作方便等优点。该触发电路在实际应用中已成功触发过100 A~400 A的晶闸管。