引言
通过对长期采集到的数据进行分析,可以得到当地光伏建筑一体化中太阳能电池板在不同方位角和俯仰角下的发电效率,以此来评估在光伏建筑一体化中光伏发电方案的可行性。
1 系统工作原理
本系统由云台、太阳能电池板、太阳总辐照度传感器和控制系统构成,其工作原理框图如图1所示。控制系统通过控制云台,使得安装在云台上的太阳能电池板能够在纵向和横向上扫描,从而采集到全方位的太阳辐照度数据。太阳总辐照度由控制系统直接读取安装在固定水平面上的太阳总辐照度传感器而得来,其值是用来标定太阳能电池板的发电功率所折算得到的全方位太阳辐照度。在实际的光伏发电中,由于太阳能电池板的固有特性,太阳总辐照度不能完全表征光伏发电的效率,因此通过太阳能电池板的发电功率所折算得到的太阳辐照度在光伏建筑一体化中才有实际的指导意义。我国大部分地区处住北回归线以上,纵向上能够让太阳能电池板在水平和垂直方向之间转动,横向上能够让太阳能电池板在正东和正两方向之间经过正南转动,即可满足设计要求。通过控制系统来控制云台,就可以获取太阳能电池板准确的方位角和俯仰角,方位角的范围为0~180°,俯仰角的范围为0~90°。

2 系统硬件设计
本系统以ADSP-BF506F(简称BF506F)处理器为核心,其硬件结构如图2所示。BF506F处理器内核时钟可高达400MHz,片上有68 KB L1存储器、4 MB可执行闪存,能够满足本系统的设计要求。本系统采用了BF506F处理器的UART的DMA方式,具有SPI、TWI、PWM单元、TIMER、ADC、PGIO等各种接口和功能单元,可方便实现云台的控制、数据的采集以及与PC机的通信。
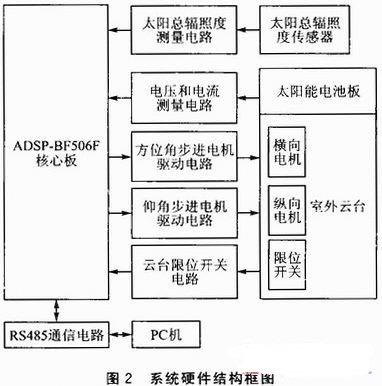
BF506F处理器通过步进电机驱动电路来控制云台的转动,让安装在云台上的太阳能电池板能够在横向和纵向上转动;云台内部有限位开关,通过调节限位开关的位置来设定太阳能电池的转动范围;当太阳能电池转动了一定的角度后,BF506F就采集一次数据并将数据发送到PC机,所采集的数据包括太阳总辐照度和太阳能电池的电压、电流值;当BF506F接收PC机发送的指令后就执行相应的动作,从而实现系统的自动运行。
2.1 步进电机驱动电路
步进电机的驱动电路以东芝的TB6560为主芯片,其驱动电路如图3所示。步进电机控制信号有3个(CLK、CW、ENABLE),分别控制电机的转角和速度、电机正反方向以及使能,均须用光耦隔离后与芯片连接。光耦的前向和后向电源应该是单独隔离电源,否则不能起到隔离干扰的作。OUT_AP、OUT_AM、OUT_BP、OUT_BM引脚分别为电机2相输出接口,内部集成了续流二极管。
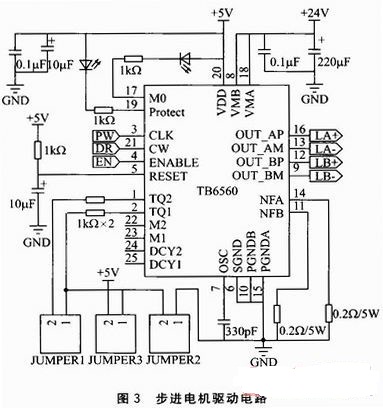
NFA、NFB分别为电机A、B相最大驱动电流定义引脚,其最大电流计算公式如下:
IOUT=0.5 V/RNF
若预先定义电机每相的最大驱动电流为2.5 A,取RNF=0.2Ω。M2、M1为细分设置引脚,外接拨码开关可设定不同的细分值,如整步、半步、1/8细分、1/16细分。由于步进电机在低频工作时,有振动大、噪声大的缺点,需要细分解决。为尽可能减小电机发热,需要TB6560的TQ2和TQ1引脚电平在电机工作时设置为电流输出最大,在电机不工作时电流减半甚至更小,故称为“自动半流电路”。用NFA、NFB定义最大输出电流后,通过TQ2和TQ1设置电流比率输出,设为00、01、10、11时,输出的电流分别为最大电流的100%、75%、50%、25%。改变电机的驱动电流,也就改变了电机输出扭矩的大小。
2.2 太阳总辐照度测量电路
太阳总辐照度在本系统中是一个标定量,用来标定通过测量太阳能电池的功率来计算得的太阳辐照度。太阳总辐照度是通过读取国家一级辐照传感器TBQ-2值而得到的。太阳总辐照度传感器输出的信号电压为0~20mV,对应的是辐照度为0~2000 W/m2,因此先对传感器输出的信号进行放大,再进行模/数转换,最后通过计算即可得到太阳总辐照度的值。
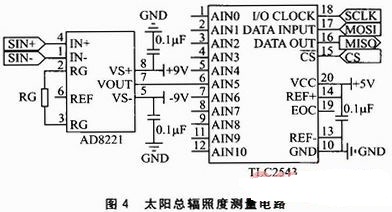
太阳总辐照度的测量电路如图4所示。信号放大所采用的是增益可编程、高性能仪表放大器AD8221,通过单一电阻可在1~1000范围内设置增益。模/数转换采用的是带有SPI接口的12位模数转换器TLC2543。BH506F核心板通过SPI接口即可读取太阳总辐照度的值。
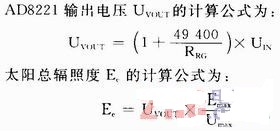
式中,UIN为太阳总辐照度传感器的输出信号电压,其范围为0~20 mV;因为要将0~20 mV信号放大到0~5 V,所以RG的值为198.4 Ω;太阳总辐照度Ee的单位是W/m2;可测量到的最大辐照度Emax为2000W/m2,可放大到的最大电压Umax为5V。
2.3 太阳辐照度测量电路
由于太阳能电池发电的功率与太阳的辐照成正比,本系统通过测量太阳能电池板的功率来计算太阳辐照度。其测量电路如图5所示。AV +、AV-为太阳能电池板电压输出的正极和负极,RE为高精密的测量电阻,RL为5 W的功率电阻;SDA和SCL为TWI接口的两根信号线,接BF506F核心板的TWI接口。BF506F通过TWI接口可以直接读取VIN-相应的电压UVIN-,以及VIN+和VIN-的电压差UVIN。

根据双向电流、电压与电源监控器INA209的测量原理和太阳辐照度与太阳能电池发电功率的关系可以计算出太阳辐照度。太阳能电池板电流IRE和太阳辐照度Ep的计算公式如下:

式中,太阳辐照度Ep的单位为W/m2;S为太阳能电池板的面积,其值为637 cm2;ψ为多晶硅太阳能电板的转换效率,其值为12%。
2.4 系统通信部分
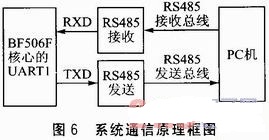
系统通信原理框图如图6所示,采用RS485来进行数据的传输。本文的测量平台是放置在较为空旷的室外,以便能采集到较为理想的数据,而接收机(PC机)放置在室内,这两者之间的距离比较远,采用RS485总线进行数据传输能够符合本系统的要求。在此用的是全双工通信方式,即发送和接收可同时进行,互不受影响。采用4根信号线,2根负责接收数据,另外2根负责发送数据。
3 系统软件设计
图7为系统的程序流程。上电后先对BF506F核心板进行初始化,包括初始化UART、ADC、TIMER、PGIO、SPI、TWI等。当系统初始化完成后便开始运行主程序,首先测量并计算运动控制算法所需要的各个参数,要测量的有纵向电机从水平方向转动到垂直方向的总步数和横向电机从正东方向转动到正西方向的总步数。当计算完参数后就开始执行运动控制算法A,执行完毕后对运动控制算法B的起点进行重新定位,然后执行控制算法B。当执行完运动控制算法B后对运动控制算法的各个数据进行重新测量和计算,如此一直循环下去,直到程序被停止。
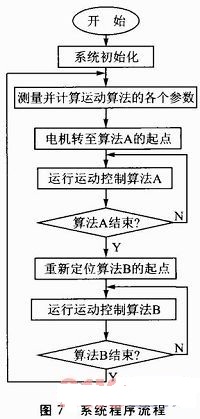
算法A中纵向步进电机通过频繁地来同转动可获得纵向上(俯仰角)准确的数据;算法B中横向步进电机通过频繁地来回转动可获得横向上(方位角)准确的数据。此两种算法在不停地交替执行,不但可以在横向和纵向上获取丰富准确的数据,而且可以延长步进电机的使用寿命。
在本系统中,定义正东方向为0°,正南方向为90°,正西方向为180°,通过控制横向步进电机的转动使得太阳能电池板在横向0°和180°之间转动;定义太阳能电池板与地面平行时为0°,太阳能电池板与地面垂直时为90°,通过控制纵向步进电机的转动使得太阳能电池板在纵向0°和90°之间转动。同时还定义横向为X,纵向为Y,则太阳能电池板运动到某一点时可用(x,y)来表示。下面是算法A和算法B的具体执行过程。
算法A的起点为(0,0)点,终点为(180,90)点。纵向步进电机每转动90°,横向步进电机就向180°点(正西方向)方向转动3°,当横向步进电机转动到180°点后就结束算法A。其程序执行顺序如下:
①纵向步进电机从0°点向90°点运动1°。
②判断纵向电机是否到达90°点,“是”则接着运行,“否”则返回第1步。
③横向步进电机从0°点向180°点运动3°。
④判断横向电机是否到达180°,“是”则结束算法A,“否”则接着运行。
⑤纵向步进电机从90°点向0°点运动1°。
⑥判断纵向电机是否到达0°点,“是”则接着运行,“否”则返回第5步。
⑦横向步进电机从0°点向180°点运动3°。
⑧判断横向电机是否到达180°,“是”则结束算法A,“否”则接着运行。
算法B的起点为(180,90)点,终点为(0.0)点。横向步进电机每转动180°,纵向步进电机就向0°点(水平方向)方向转动3°,当横向步进电机转动到0°点后就结束算法B。其程序执行顺序如下:
①横向步进电机从180°度点向0°点运动1°。
②判断横向电机是否到达0°点,“是”则接着运行,“否”则返回第1步。
③纵向步进电机从90°点向0°点运动3°。
④判断纵向电机是否到达90°,“是”则结束算法B,“否”则接着运行。
⑤横向步进电机从0°点向180°点运动1°。
⑥判断横向电机是否到达180°点,“是”则继续,“否”则返回第5步。
⑦纵向步进电机从90°点向0°点运动3°。
⑧判断纵向电机是否到达0°,“是”则结束算法B,“否”则返回第1步。
结语
本系统的硬件实物图如图8所示。设计本系统是为了获取全方位的太阳辐照度数据,其要求是在准确的方位角和俯仰角下采集到精确的太阳辐照度数据。在本系统中,影响数据精度的有两个方面:一是测量电路本身,为了减小太阳辐照度数据的误差,在硬件上改进测量电路,在软件上优化测量算法;二是云台所造成的误差,为了更加准确地定位太阳能电池板的方位,可以改进云台内部的步进电机和齿轮,以及优化云台的控制算法。经过长期地运行本系统,各功能模块工作正常,测得数据真实可靠。