用PVC材料是参考了懒猫侠的,PVC材料硬度适中,一张尺子一把刻刀就可以随意处理了,最重要的价格便宜,上五金店几块钱就搞定了。舵机用的是塑料齿的舵机,原因也是便宜,这些材料加起来四五百左右。
初次组装设计,花了我整整一天加一个晚上的时间,手都起泡了,还不小心被刻刀割了两刀,真是悲剧。不过看到自己组装好的模型,小小的激动了一把。
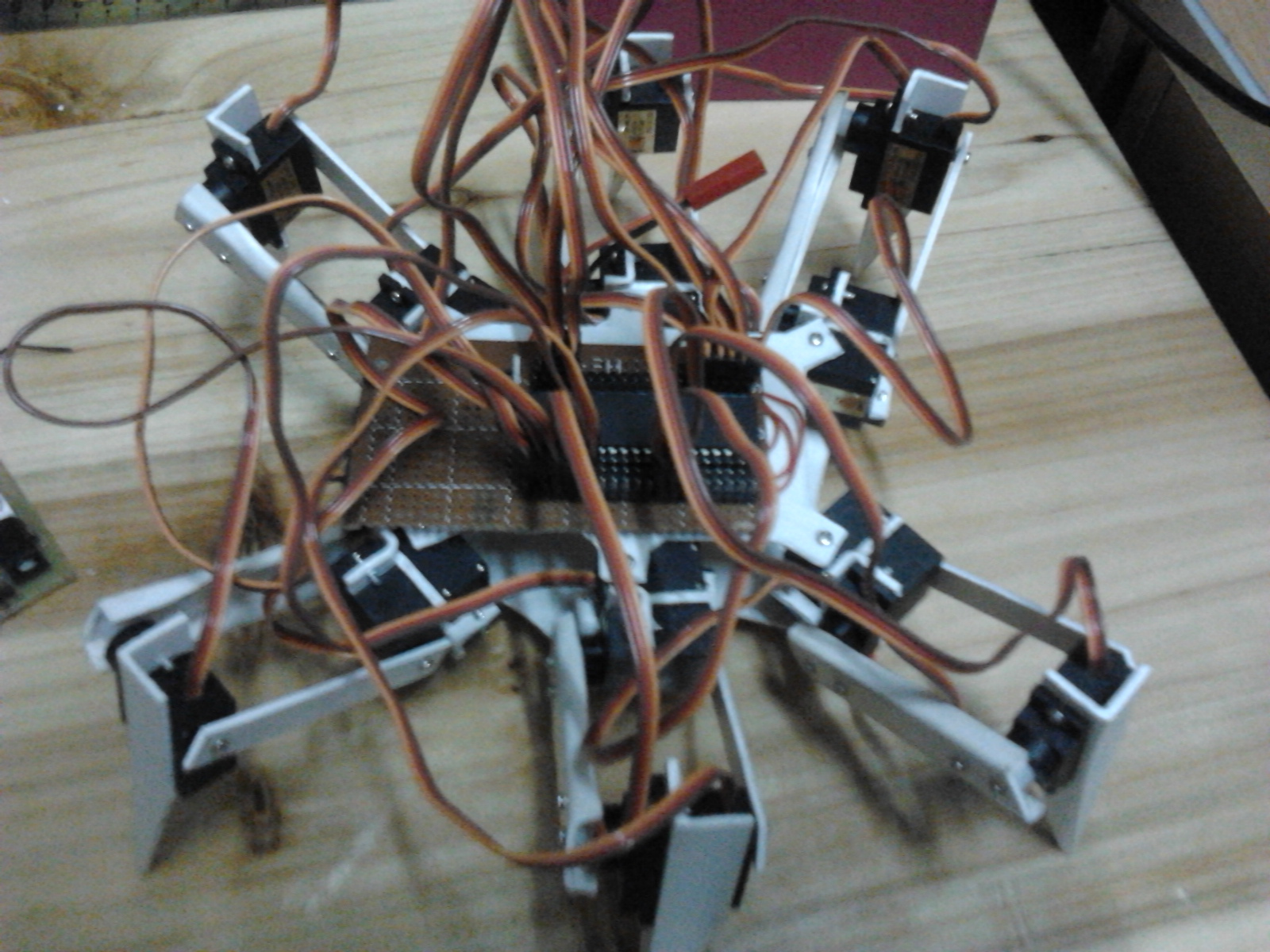
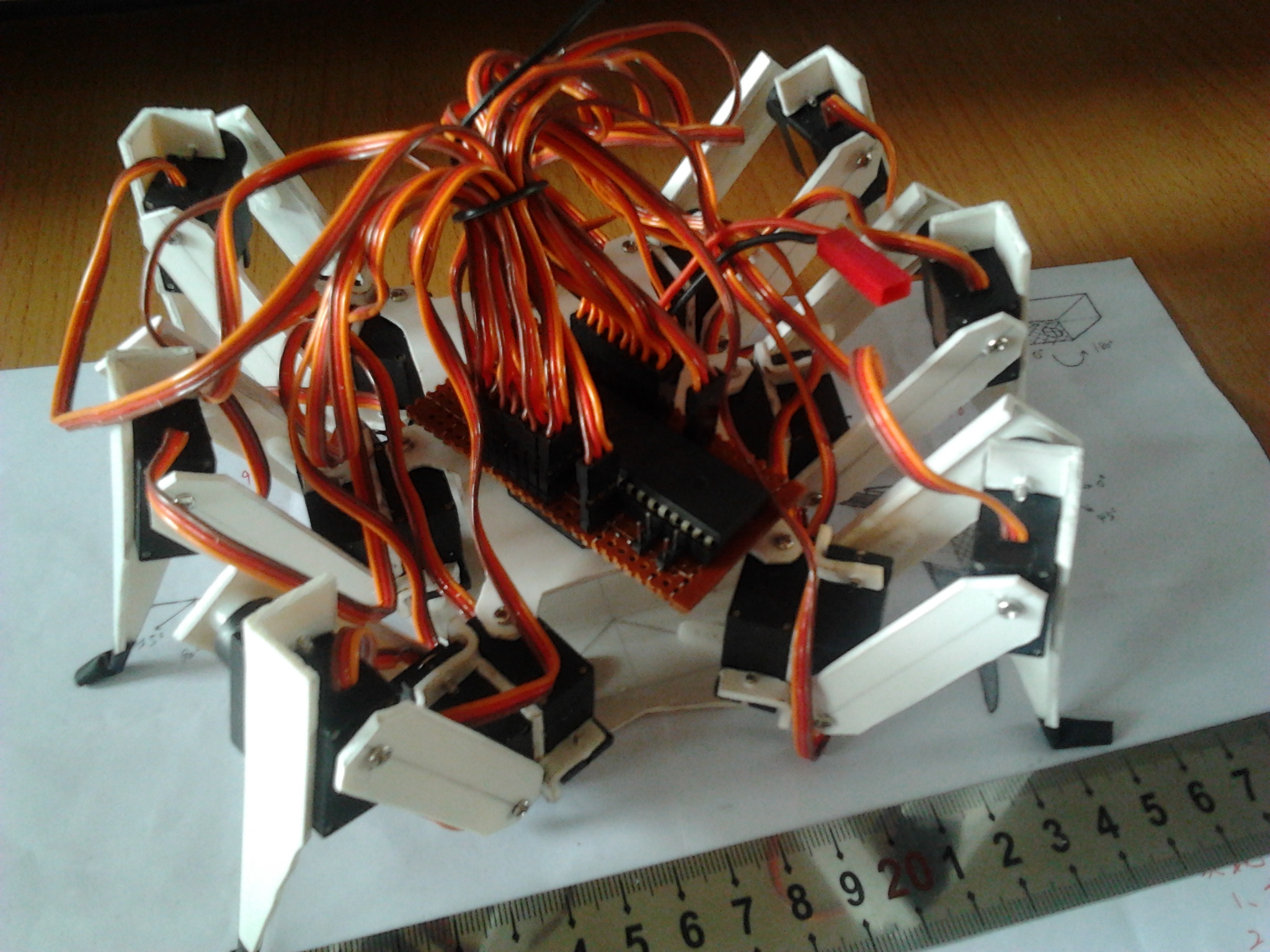
来张俯视图:
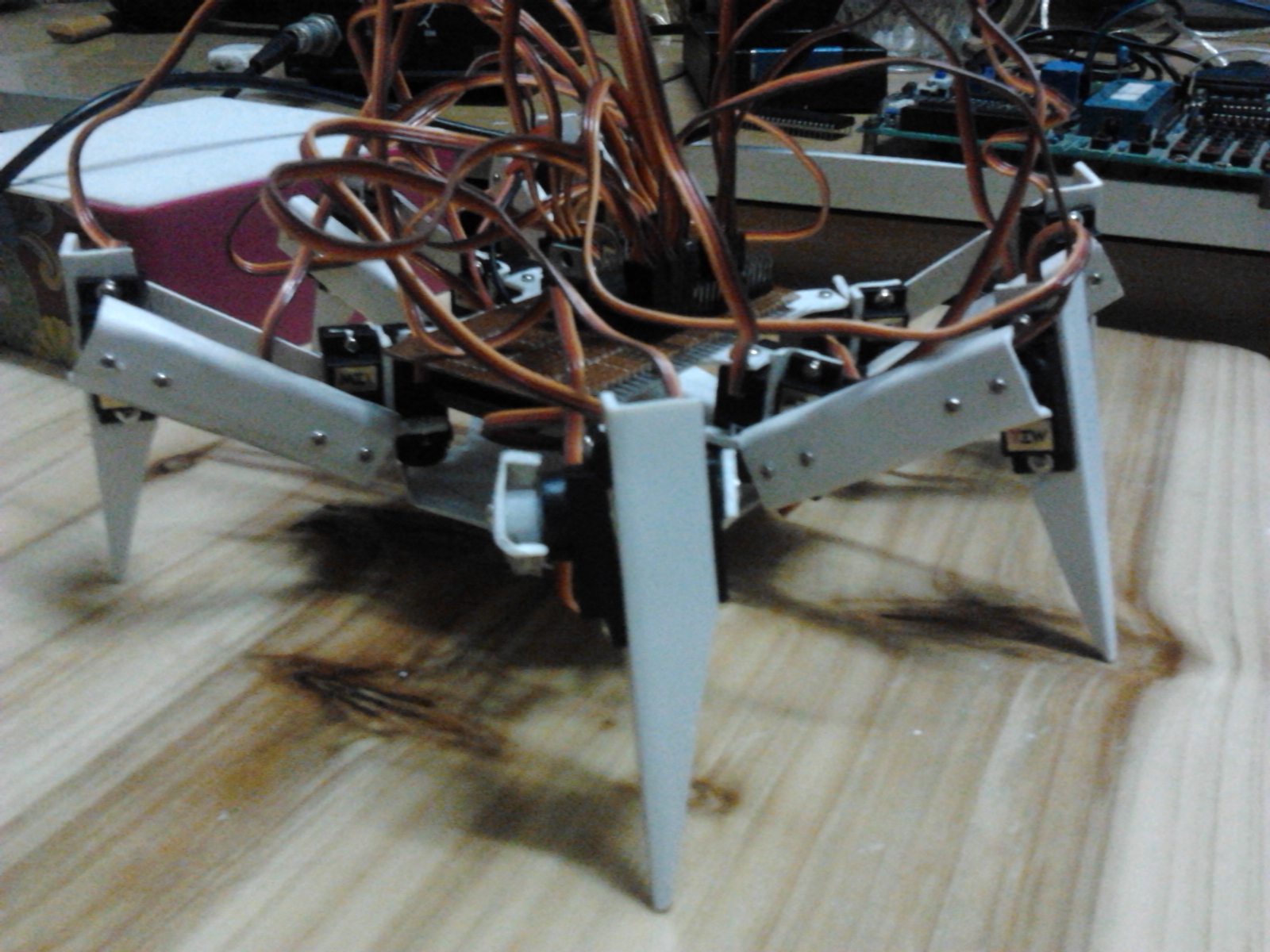
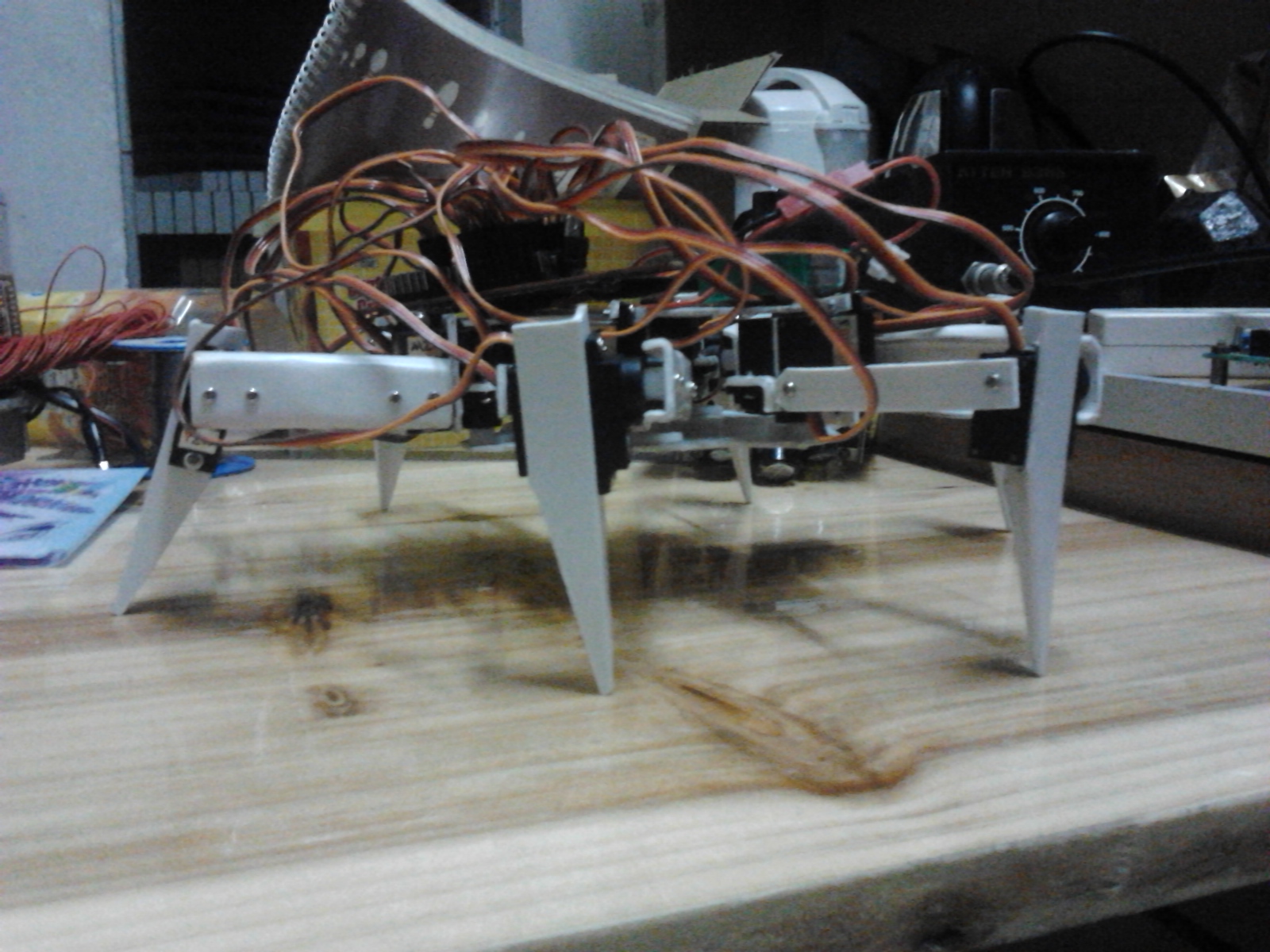
侧面图:
组装好模型之后,我首先用STC89C52单片机试了一下驱动舵机(当然在确认收货之前做的,要确保舵机万无一失嘛),用洞洞板焊了一块18路舵机驱动板:
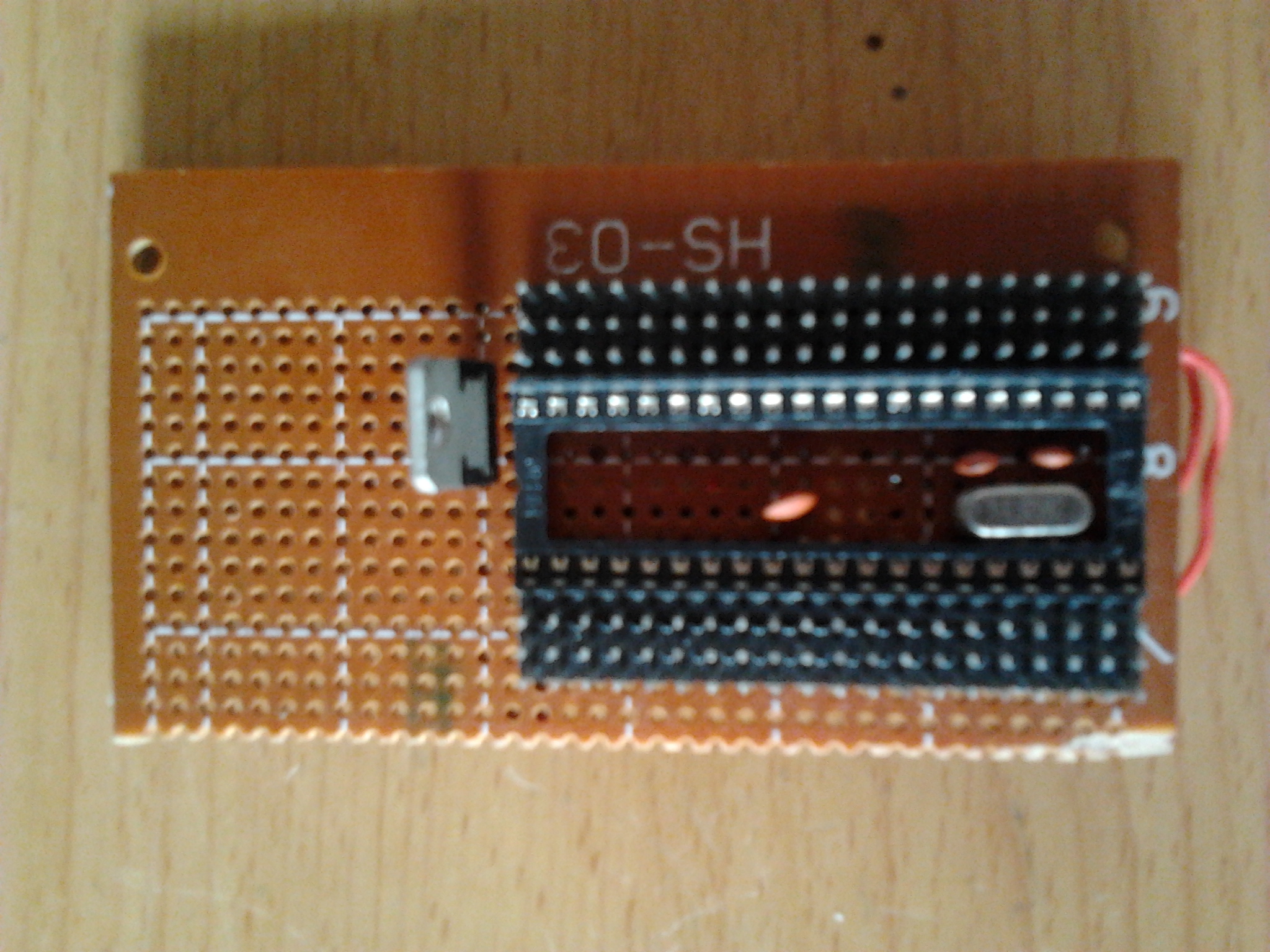
调试了一天,发现根本无法驱动,后来上网猛搜资料,才发现是普通51的IO驱动能力不够,于是全部IO口都加了上拉电阻,果真可以驱动舵机了!
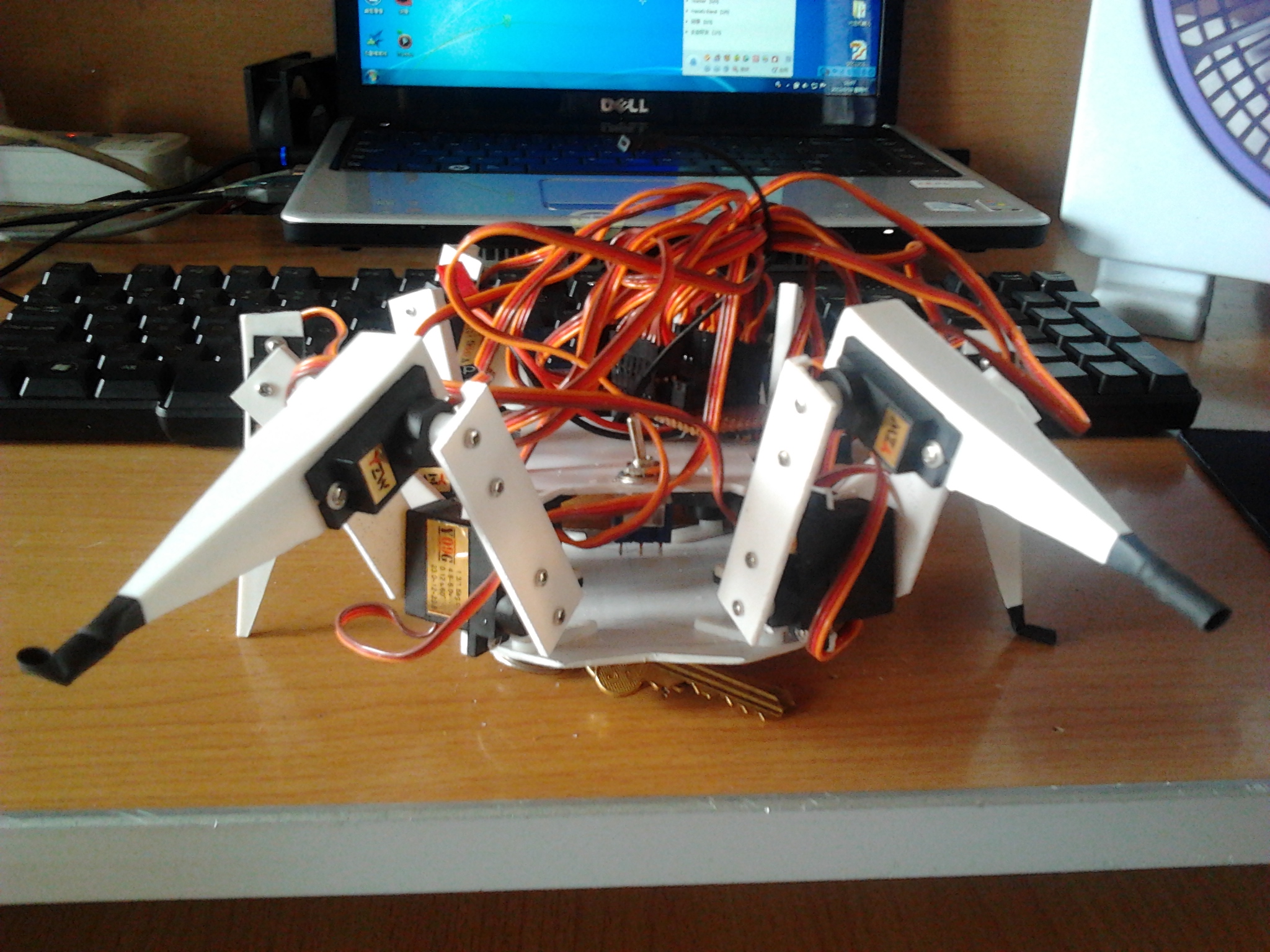
于是,我同时驱动18路舵机,都保持在90度的位置,看到没有,插上电池,我的六足蜘蛛站起来了。再调一下舵机与支架的夹角,使六足整体看来动作平衡。
由于之前做支架比较赶,导致大腿的支架本身就不平整,对六足整体的平稳影响很大,于是又花了两个小时,把大腿的支架给换了,是不是比上面的美观一点了?
考虑到普通51单片机,以后做板子的话还要加排阻,使得板子面积变大。同时当需要处理的数据太多时,普通51的响应不够快,于是换了增强型的51,STC12C5A60S2,其IO有强推挽功能,无需外加上拉电阻,速度比普通51平均快12倍。
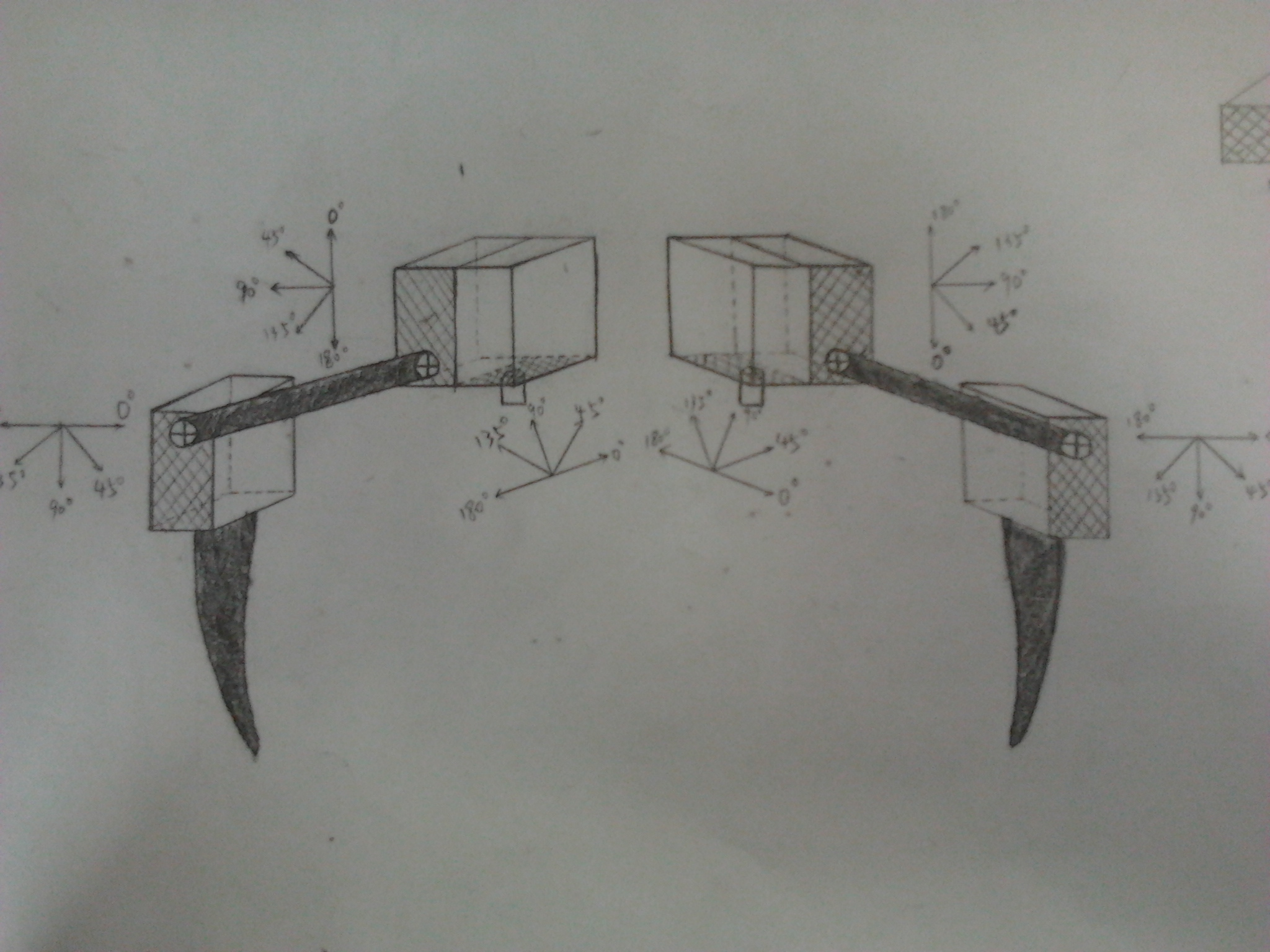
接下来是画板子和编程了喔,每一个动作都要求每一个舵机要不同的转角,很难放在脑子里面想象,会短路的。于是我画了一个模型图,对着编程就轻松多啦