0 引言
直流电动机是最早发明能将电能转换为机械能的设备,它可追溯到法拉第所发明的碟型电动机。到了1880年已成为主要的电能到机械能转换装置,但之后由于交流电的使用日趋普及,而发明了感应电动机与同步电动机,直流电动机的重要性亦随之降低。直到约1960年,由于SCR的发明,磁铁材料、碳刷、绝缘材料的改良,以及变速控制的需求日益增加,再加上工业自动化的发展,直流电动机驱动系统再次得到了发展的契机,到了1980年直流伺服驱动系统成为自动化工业与精密加工的关键技术。
直流电动机可分为特种电机、电磁式电动机和永磁式电动机。特种电机一般无绕组,驱动较为复杂,作为电机的一种已自成体系。电磁式电动机因励磁方式不同,其特性也各有千秋。永磁式电动机性能与电磁式并励电动机相近,起动转矩较大,机械特性硬,负载变化时转速变化不大,适用于小功率直流驱动,如电动玩具、电动工具、音响设备、汽车电器等。本文主要讨论此类功率不大、电压不高、体积较小的微型直流电动机的驱动。
这种电动机只有两根引线,调节供电电压或电流可调速,更换两根引线的极性,电动机换向。其驱动电路受单片机控制,一般要求能进行正反转和调速驱动,而且体积不宜太大。无论是分立元件的还是集成电路的各种驱动电路资料很多,但笔者在主持湖北省教育厅“中夏教育机器人研究开发”科研项目和本校“全国大学生电子设计竞赛”赛前培训时,经过大量的试验,发现可操作性强的方案并不多见。
以下所述电路用于3V供电的微型直流电机的驱动,这种电机有两根引线,更换两根引线的极性,电机换向。该驱动电路要求能进行正反转和停止控制。
1 电路一
如下图所示,些电路是作者最初设计的电路,P1.3、P2.2和P2.4分别是51单片机的IO引脚。设计的工作原理是:当P1.3高电平、P2.2和P2.4都为低电平时,电机正转。此时,Q1和Q4导通,Q2和Q3截止,电流注向为+5VàR1àQ1àMàQ4;当P1.3低电平、P2.2和P2.4都为高电平时,电机反转。此时,Q2和Q3导通,Q1和Q4截止。P2.2为高电平同时P2.4为低电平时,电路全不通,电机停止。
图中电阻:R1=20Ω,R2=R3=R4=510Ω
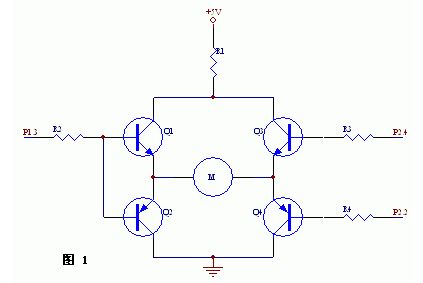
但实际实验情况去出人意料,即电机正向和反向都不转。经测量,当P1.3高电平,P2.2和P2.4都为低电平时,Q4导通,但Q1不导通,P1.3的电平只有0.67V左右,这样Q1无法导通。
经分析原因如下:51的P1、P2、P3各引脚都是内部经电阻上拉,对地接MOSFET管,所谓高电平,是MOSFET截止,引脚上拉电阻拉为高电平。若此内部上拉电阻很大,比如20K,则当上图电路接上后,则流过Q1的b极的电流最大为(5-0.7)/20mA=0.22mA,难以动Q1导通。所以此电路不通。
总结:51单片机的引脚上拉能力弱,不足以驱动三极管导通。
2 电路二
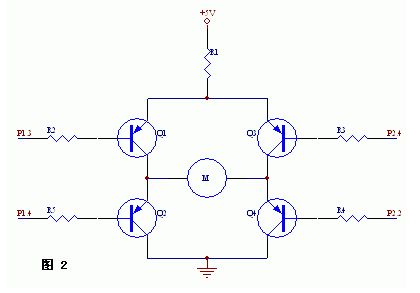
如下图所示:这个电路中四个三极管都采用PNP型,这样,导通的驱动是控制引脚输出低电平,而51的低电平时,是通过MOSFET接地,所以下拉能力极强。
但此电路的Q1和Q3需要分别控制,所需控制引脚较多。如果要用一个IO脚控制则可以加一个反相器。但此电路的Q1和Q3需要分别控制,所需控制引脚较多。如果要用一个IO脚控制则可以加一个反相器。如图3所示。图中标有各点实测电压值。
3 电路三
在电路二中,由于Q2和Q4的发射极高出基极一个0.7V,而基极最低为0V,实际由于CPU引脚内部有MOSFET管压降,所以Q2和Q4的发射极不会低于1V,这样使M两端的有效电压范围减小。
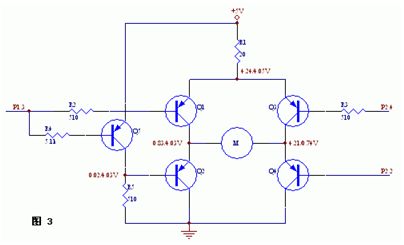
要解决这一问题,则Q2和Q4需换成NPN管。但NPN管的驱动如电路一所示,只靠CPU引脚的上拉是不行了,所以需要另加上拉电阻,如下图所示。
上图中,与电路一不同的是两只NPN管移到了下方,PNP在上方,这样,Q1和Q3的集电极的电位最低可达到一个管压降(0.3V)。这样增加了M的压降范围。
但为了保证对NPN管的足够的驱动,P1.3和P2.2必须加上拉电阻,如图所示。图中,R2、R5、R6都不可少。所以这种电路的元件用量比较大。
还有,R5应该比R6大几倍,比如10倍,这样,当Q1导通时,P1.3处的电压可以分得较大,不致于使Q2导通。如果R5太小或为0,则当Q1导通时,由于P1.3处的压降只有0.7V左右,将使Q2也导通。
经过试验,R2、R6、R3、R4可取510Ω,R5取5.1kΩ。这种值下各处的电压如下(R1为20欧):
U1:4.04U2:2.99U3:3.87U4:4.00U5:0.06U7:0.79
4 电路四
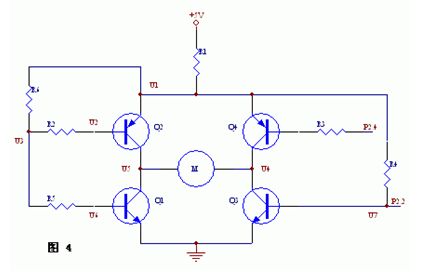
这个电路由电路一改造而来,如下图5,图中标有各点实测电压值:
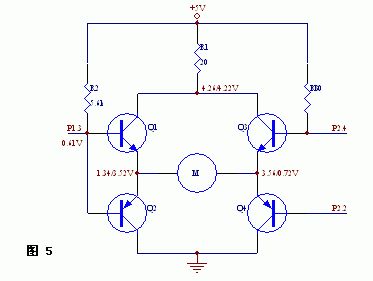
此图中基极的限流电阻都去掉了,因为作者设计的电路对元件要求要少。从电路上分析,不要没什么关系,有R1起着总的限流作用,而且引脚内部有上拉电阻,这样保证电路不会通过太大的电流。
这个电路可以使电机运行。
但在R2的选择上,比较讲究,因为R2的上拉作用不但对Q1有影响,而且对Q2的导通也有影响。如果R2选的过小,则虽然对Q1的导通有利,但对Q2的导通却起到抵制作用,因为R2越小,上拉作用越强,Q2的导通是要P1.3电位越低越好,所以这是矛盾的。也就是说,Q1的导通条件和Q2的导通条件是矛盾的。
经实验,R2取5.1k欧比较合适。由此可见,这个电路虽然很省元件和CPU引脚,但驱动能力有个最大限,即Q1和Q2的驱动相互制约下,只能取个二者都差不多的折中方案。否则如果一个放大倍数大,则另一个则会变小。