0引言
步进电机是一种将电脉冲转化为角位移的执行机构。当步进电机驱动器接收到一个脉冲信号,它就驱动步进电机按设定的方向转动一个固定的角度(即步距角)。通过控制脉冲的个数来控制角位移量,从而达到正确定位的目的;通过控制脉冲频率来控制电机转动的速度和加速度,从而达到调速的目的。
步进电机分为三种:永磁式(PM),反应式(VR)和混合式(HB)。永磁式步进电机一般为两相,转矩和体积较小,步进角一般为7.5度或15度;反应式步进电机一般为三相,可实现大转矩输出,步进角一般为1.5度,但噪声和振动都很大;混合式步进电机混合了永磁式和反应式的优点。它分为两相和五相,两相混合式步进电机步距角一般为1.8度而五相混合式步进电机步距角一般为0.72度。其中混合式步进电机的应用最为广泛 。
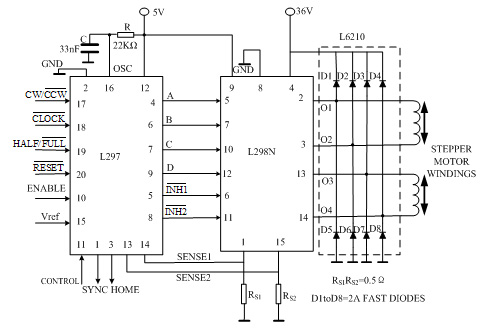
图1:L297/298驱动器
基于L297/298驱动芯片的两相双极性混合式步进电机驱动器(见图1),采用恒流斩波图1:L297/298驱动器方式驱动,每相电流可达2A。其中L297是步进电机控制器,适用于双极性两相步进电机或单极性四相步进电机的控制。用L297输出信号可控制L298双桥驱动集成电路,用来驱动电压最高为46V,总电流为4A以下的步进电机。L297也可用来控制由达林顿管组成的分立电路,以驱动更高电压,更大电流的步进电机。L297只需要时钟、方向和模式输进信号,相位由内部产生,从而减轻了微处理器和程序设计的负担。L297采用固定斩波频率的PWM恒流斩波方式工作。L297主要由译码器,两个固定斩波频率的PWM恒流斩波器以及输出控制逻辑组成 。L298是用来驱动步进电机的集成电路,采用双全桥接方式驱动,由于是双极性驱动,步进电机的定子励磁绕组线圈可以完全利用,使步进电机达到最佳的驱动 。
1原理
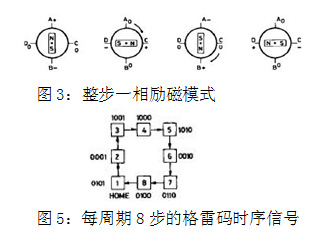
基于L297/298驱动器的混合式步进电机有三种不同的工作模式:即半步模式(HALFSTEP)(见图2)、整步一相励磁模式(FULLSTEPONEPHASEON)(见图3)、整步两相励磁模式(FULLSTEPTWOPHASEON)(见图4)。步进电机工作于半步模式时,其内部定子绕组的励磁是一相与两相相间的,此时步进电机每接受一个脉冲,只转过半个步距角。步进电机工作于半步模式时,步进电机所获得的转距较常规值偏小。步进电机工作于整步一相励磁模式时,其内部定子绕组的励磁在任何一个时刻都是一相的,此时步进电机每接受一个脉冲,转过一个步距角。步进电机工作于整步一相励磁模式时,步进电机获得常规转距。步进电机工作于整步两相励磁模式时,其内部定子绕组的励磁在任何一个时刻都是两相的,此时步进电机每接受一个脉冲,转过一个步距角。步进电机工作于整步两相励磁模式时,步进电机获得的转距相对前两种而言是最大的 。
L297的核心是其内部的译码器,通过译码器L297产生三种相序信号,以对应三种不同的工作模式。译码器受L297的方向输进引脚信号 和半步方式/整步方式输进引脚信号
和半步方式/整步方式输进引脚信号 所控制。译码器内部是一个3BIT的计数器,加上一些组合逻辑,产生每周期8步的格雷码时序信号(见图5),此即半步模式的时序信号,此时L297的输进引脚信号取高电平。若引脚取低电平,则得到整步工作模式。假如引脚是在译码器的八步格雷码时序信号的奇数状态位时取低电平的,则得到整步两相励磁模式;假如引脚是在译码器的八步格雷码时序信号的偶数状态位时取低电平的,则得到整步一相励磁模式。
所控制。译码器内部是一个3BIT的计数器,加上一些组合逻辑,产生每周期8步的格雷码时序信号(见图5),此即半步模式的时序信号,此时L297的输进引脚信号取高电平。若引脚取低电平,则得到整步工作模式。假如引脚是在译码器的八步格雷码时序信号的奇数状态位时取低电平的,则得到整步两相励磁模式;假如引脚是在译码器的八步格雷码时序信号的偶数状态位时取低电平的,则得到整步一相励磁模式。

2方案
基于L297/298驱动器的混合式步进电机工作模式的单片机接口硬件电路如图所示(见图6)。在图6中L297的 时钟信号输进引脚接单片机89C51的P1.3引脚,引脚接P1.6,
时钟信号输进引脚接单片机89C51的P1.3引脚,引脚接P1.6, 引脚接P1.7。与该接口硬件电路相配合的软件编程[5]如下:(仅以整步一相励磁模式为例给出汇编语言源程序)
引脚接P1.7。与该接口硬件电路相配合的软件编程[5]如下:(仅以整步一相励磁模式为例给出汇编语言源程序)
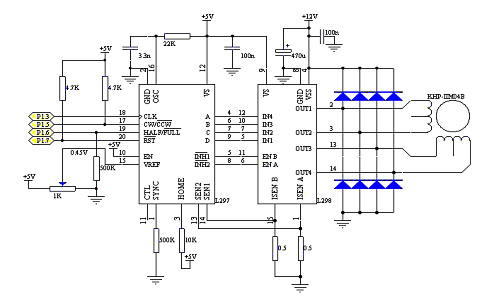
图6:单片机接口硬件电路
…
MOVTMOD,#11H
MOVTH1,#0D8H;定时器1初始化,10ms中断一次
MOVTL1,#0F0H
CLRP1.7;L297内部计数器复位,计数初值为0101
NOP
NOP
SETBP1.7
SETBP1.3;第一个时钟的高电平
SETBP1.6;设定当前工作模式为半步模式
SETBTR1
LCALLTT;第一个时钟的低电平
LCALLTT;第二个时钟的高电平,即时序信号的偶数状态位
NOP
NOP
CLRP1.6;置引脚为低电平,当前工作模式为整步一相励磁模式
LCALLTT;第二个时钟的低电平
…
TT:JNBTF1,TT
CLRTF1
CLRTR1
MOVTH1,#0D8H
MOVTL1,#0F0H
CPLP1.3
SETBTR1
RET
…
…
3结论
该接口方案是针对小型重物的步进电机悬挂系统而设计研究的,接口电路简单,对于混合式步进电机的工作模式可通过软件编程加以方便的切换。尤其是对于步进电机转距要求不太高的应用场合,还可通过改变步进电机的工作模式,控制步进电机的发热[6]。
本文作者创新点在于较为深进的研究了基于L297/298这种常用步进电机驱动芯片组合在实际应用中的一个还未被充分熟悉的潜伏上风,即L297的三种工作模式,并给出了相应的单片机接口,从而能更好的发挥这种驱动芯片组合在混合式步进电机驱动中的应用潜力,并进步了该驱动组合在不同工作场合下应用的灵活性。
参考文献:
[1]刘宝廷.步进电动机及其驱动控制系统[M].哈尔滨产业大学出版社,1997
[2]L297STEPPERMOTORCONTROLLERS[Z].STMicroelectronics,2001
[3]L298DUALFULL-BRIDGEDRIVE[Z].STMicroelectronics,2000
[4]AN470APPLICATIONNOTEOFTHEL297STEPPERMOTORCONTROLLER[Z].STMicroelectronics,2003
[5]徐惠民,安德宁.单片微型计算机原理、接口及应用(第二版)[M].北京邮电大学出版社,2000
[6]杨忠宝,林海波.基于80C196MC的步进电机斩波恒流均匀细分电路的实现[J].微计算机信息,2003,7:27-32