1 分布式电源并网逆变器系统设计
1.1DC-DC变换器
DC-DC变换器是通过半导体阀器件的开关动作将直流电压先变为交流电压,经整流后又变为极性和电压值不同的直流电压的电路,这里要阐述的是中间经过变压器耦合的直流间接变换电路。DC-DC变换器在将直流电压变换为交流电压时频率是任意可选的,因此使用高频变压器能使变压器和电感等磁性元件和平波用电容器小型轻量化。如今,随着半导体阀器件的进步,输出功率为100 W以上的电源实际上采用的开关频率都在20~500kHz范围内,MHz级高频变换器也在开发研究之中。而且,通过变换频率的高频化,可以使平波用电容的容量减小,从而能够使用陶瓷电容等高可靠性的元件。而且,本文在举例阐述动作原理是采用双极功率晶体管、IGBT、MOSFET等开通关断可控的器件作为直流电压变换为交流电压的半导体阀器件,使用最多的还是MOSFET.
1.2 直流母线电压PID控制器设计
作为直流母线400V电压必须具有一定的稳定性,不应该随着负载的变化或电池电压的改变而产生波动。因此必然需要用到反馈的概念。反馈理论的要素包括三个部分:测量、比较和执行。测量关心的变量,与期望值相比较,用这个误差纠正调节控制系统的响应。由于PID控制器可以实现无差调节,其优异的动态稳态特性,以及方便灵活的参数整定方法,因此在逆变并网器中直流母线的电压控制选择PID控制算法。
在闭环控制系统里,将调节器置于纯比例作用下,从小到大逐渐改变调节器的比例系数,得到等幅振荡的过渡过程。此时的比例系数称为临界比例系数Ku,相邻两个波峰间的时间间隔,称为临界振荡周期Tu.
1.3 逆变并网锁相环设计
锁相环分为模拟锁相环和数字环锁相。模拟锁相环在电路可靠性、稳定性和集成度方面有着不可克服的缺陷:数字锁相环又分为由数字逻辑器件构成的全数字逻辑锁相环和基于DSP的软件锁相环。全数字逻辑锁相环路由逻辑器件构成。
为了实现对电网电压(SIGNAL)周期和相位的采样,这里利用了一个迟滞比较器把信号源的模拟采样信号(SIGNAL)整形为矩形波(TO_DSP)然后通过TMS320F28X的捕获单元得到电网电压的频率和相位信息。在设计中应当注意的是,由于软件是通过电网电压的上升沿来获得周期和相位信息的,因此在硬件的设计上应当保证电网电压的过零点和正弦波整形得到的矩形波的上升沿保持一致(即不能有延时),这就要求计算迟滞比较器的上限触发电平U+为0 V.
迟滞比较器的上、下限触发电平为:
式中:U+,U-为迟滞比较器的上、下限触发电平;UOH,OL为输出电压的上下限(UOH为5 V,UOL为0 V);UR为比较器的基准电压,这里为0V.
交流有效值定义为:
式中:x(t)为被测交流信号;Xeff为对应的有效值;t是时间;T是交流信号的周期。式(3)给出的有效值包含了基波和谐波的共同贡献,通常称这种有效值为真有效值,有时也称为方均根值。
对于数字测量系统,式(3)变成:

式中:xm(k)为交流信号在kTs时刻的采样值(也称采样数据),Ts为采样周期,下标m代表该采样值采自交流信号的第m个周波,k代表在第m个周波内的第k次采样(k=1,2,…,N);N是在交流信号一个周期内的采样次数或采样点数。
1.4 改进MPPT算法
传统MPPT算法,即爬山法,是一种比较实用的MPPT控制算法,这种方式虽在一定程度上减轻了CPU的负担,但由于周期性寻优,会对系统的输出电压造成周期性的波动。
改进MPPT算法基本思想是:
(1)利用过山车法,即先将光伏电池阵列两端电压U1钳制在蓄电池电压U2处,再逐渐增加U1,使光伏电池阵列的输出功率点由小到大,经过MPP后,继续增大U2,使输出功率比最大输出功率小于一个阈值△P1.输出功率由小变大,再变小,一定会经过一个最大点。在输出功率变化过程中,记录下光伏电池阵列输出最大功率时的输出电压Umax;
(2)根据光伏电池阵列输出最大功率时记录下的Umax,利用稳压程序(可利用PID控制)将U1钳制在记录下的Umax上,实现光伏电池阵列以最大功率稳定地输出能量;
(3)当光照强度发生变化(由于在短时间内,环境温度的变化对系统输出功率的变化影响不大,可以忽略),即输出电压Umax时的输出功率P1与之前的Pmax之间差值超过一定阈值△P时,若P1>Pmax,说明光照强度增加了,MPP处的输出电压也相应增大了,所以此时应启动按增加光伏电池阵列输出电压的方向用过山车法寻找MPP程序。
2 分布式电源并网逆变器仿真
2.1 DC-DC直流升压PID控制仿真
作为直流母线400 V电压必须具有一定的稳定性,不应该随着负载的变化或电池电压的改变而产生波动。因此必然需要用到反馈的概念。反馈理论的要素包括三个部分:测量、比较和执行。测量关心的变量,与期望值相比较,用这个误差纠正调节控制系统的响应。
针对DC-DC直流母线硬件结构以及控制方式对被控模型进行数学建模,由于PWM装置的数学模型与晶闸管装置一样,在控制系统中的作用也一样。因此,当开关频率为10kHz时,T=0.1 ms,在一般电力自动控制系统中,时间常数这么小的滞后环节可以近似一个一阶惯性环节,故其传递函数为:Ws(s)≈Ks/(TS+1) (5)
这与晶闸管的传递函数完全一致。但需要注意,式(5)是近似的传递函数,实际上PWM变换器不是一个线性环节,而是具有继电特性的非线性环节。继电控制系统在一定条件下会产生自激振荡,这是采用线性控制理论的传递函数不能分析出来的。根据式(5)结合本设计开关频率10 kHz可以建立被控对象数学模型为:Ws(s)≈(400/9)/(1e-4+1) (6)
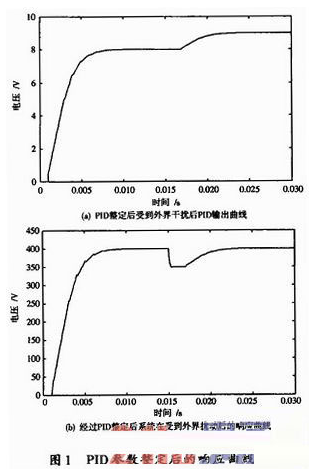
如图1(a)为进一步进行PID参数整定后的PID输出电压响应曲线,可以看出即使在外界认为施加干扰的情况下PID调节器输出电压还保持在许可范围内。图1(b)所示为进一步进行PID参数整定后直流母线电压响应曲线。可以看到即便在外界认为施加干扰的情况下直流母线电压仍可自动稳定在400V的要求电压。这能为后续的SPWM逆变并网提供稳定的直流母线电压;而由于硬件电路限制,由于PID控制一推挽电路,而该推挽电路仅可提供0~12V的调节,考虑这一点所设计出来的PID调节器输出在0~12V范围之内。 2.2 逆变并网器并网仿真
逆变并网是将逆变器所产生的正弦电压,在同频同相同幅的情况下进行并网。并通过锁相环调节并网电压以及电流,使它们达到同相,改善电能质量,从而提高传统电网稳定性。针对这一点,本设计建立元件级Simulink仿真。能有效减少失误率,提高并网可靠性,因此建立该仿真模型是很有必要的。模型中设计了相应的PID调节器,并对MPPT算法进行编写相应S函数。
太阳能电池的伏安特性如图2(a)所示,它表明在某一确定的日照强度和温度下,太阳能电池的输出电压和输出电流之间的关系,简称V-I特性。从V-I特性可以看出,太阳能电池的输出电流在大部分工作电压范围内近似恒定,在接近开路电压时,电流下降率很大。

由图2(a)可知,该伏安特性曲线具有强烈的非线性。太阳能电池的额定功率是在以下条件下定义的:当日射S=1 000 W/m2,太阳能电池温度T=25℃时,太阳能电池输出的最大功率便定义为他的额定功率。太阳能电池额定功率的单位是“峰瓦”,记以“Wp”.相应日射强度下太阳能电池输出最大功率的位置,称为“最大功率点”.根据Matlab提供的太阳能电池板模型的输出特性曲线可知当前条件下,最大功率点为241.8V时输出2083W.经过MPPT算法后,太阳能输出电压自动跟踪输出时最大功率点时的对应电压,而其亦以最大功率稳定输出。即输出为238.7V时,功率为2084W.对比之前实际太阳能电池板最大功率点数据,最大功率点为241.8V时输出2083W.可以看出该算法基本能跟踪太阳能电池板的最大功率点。
3 结论
本文针对分布式电源并网过程中的直流升压、同步锁相、逆变并网动态过程,研究了基于电网特点的FIR数字滤波、交流采样和稳定直流母线电压的数字PID控制器等技术,提出了相应的控制策略并进行Simulink动态仿真,研究工作对分布式电源并网逆变系统设计理论上具有一定指导作用。