0 引言
本文采用高效节能环保的LED 灯作为光源,利用传感器模块、光控路灯模块、恒流源模块来实现,根据环境、交通等因素,单片机采集光敏电阻或光电开关的信号控制路灯的亮灭,实现了光电和时间控制; 同时具有交通情况检测、故障自动检测与报警等功能,实现了路灯的智能化控制,节省了电力能源和人力资源。
1 系统设计要求方案
1.1 系统设计要求。
设计并制作一套模拟路灯控制系统,路灯布置如图1 所示。要求实现模拟路灯控制系统的时钟功能,设定显示开关灯时间,并能控制支路按时开灯和关灯;根据环境明暗的变化自动控制开灯和关灯; 根据交通情况自动调节亮灯状态; 独立控制每只路灯的开灯和关灯时间; 当路灯出现故障时,支路控制器发出滴答的报警信号,并显示有故障灯的编号。交通情况采用红外收发传感器方式实现自动调节功能。单元控制器具有调光功能,路灯驱动电源输出功率能在规定时间按设定要求自动减小,该功率应能在20% ~ 100% 范围内设定并调节,调节误差≤2%.
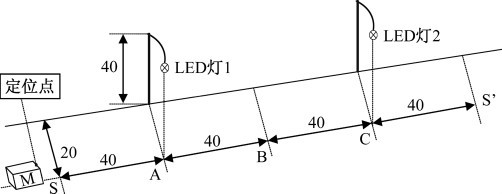
图1 路灯布置示意图
1.2 系统设计方案
系统采用C8051F020 单片机作为系统的控制器,利用有线传输方式实现对LED1 和LED2 的控制,控制方式如图2 所示。C8051F020 单片机是完全集成的混合信号系统级芯片,内部自带ADC、DAC.而本系统需要采集环境明暗的变化,自动控制LED 亮度,这需要将模拟电压转换为数字量处理,将数字量转换为模拟量控制。整个系统完全自给自足,使用外围器件少,系统成本低,系统调试简单方便。
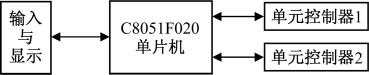
图2 C8051F020 控制方式结构。
2 系统硬件设计
2.1 系统总体框图及控制电路的设计
红外线路灯控制系统硬件结构如图3 所示。控制系统主要由主控单片机、显示接口、红外遥控、传感器、恒流驱动等功能模块组成。C8051F020 单片机接收红外线遥控信号,设定其开关灯的时间,启动模拟控制系统,并将环境明暗信号采集输入单片机进行模数转换,控制LED 灯的开关状态。单片机实时检测LED 灯的工作状态,当出现故障时,单片机控制声光电路报警并控制液晶显示器显示其故障点编号。在规定的时间内输出模拟电压控制LED 灯的亮度。根据红外接收信号检测交通情况,并能根据不同的交通情况对LED 灯作出相应智能控制。C8051F020 单片机最小系统及接口电路见图4.
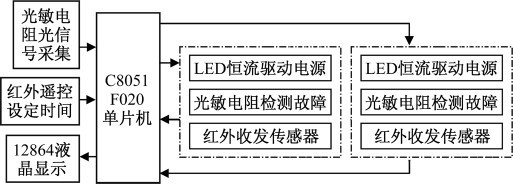
图3 红外线路灯控制系统硬件结构。

图4 C8051F020 单片机最小系统及接口电路原理图。
2.2 LED 恒流驱动电源设计
由于OP07具有非常低的输入失调电压( 最大为25 μV) ,所以OP07 在很多应用场合不需要额外的调零措施; OP07 同时具有输入偏置电流低( ± 2 nA) 和开环增益高( 300 V/mV) 的特点。OP07 集成运放6 脚的输出电压经电阻R30 反馈至反相输入端,构成同相比例电路。功率三极管Q6的基极与运放相连,用来增加驱动电流。当OP07 的同相端输入电压恒定时,由于负反馈的存在,保证了OP07 输出电压恒定,从而使流经LED 负载的电流为恒定电流。LED 恒流驱动电源电路原理图如图5 所示。
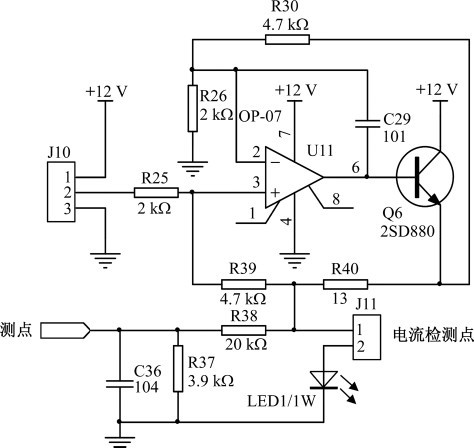
图5 LED 恒流驱动电源电路原理图。
根据图5 可知:
由上式可以看出输出电流的值仅与输入端控制电压有关,两者成正比关系,电路中R25 = R26,R39 = R30,通过选择适当的电阻值可以改变比例因子。在改变电流源比例因子的同时,也要注意改变补偿电容C29的电容值。
2.3 位置检测电路
采用红外收发传感器,一个发射管发射红外线和一个接收头接收红外线信号。图6 为红外收发传感器判断交通情况原理框图及红外接收发射电路。红外发射管和接收管对射式安装,当有障碍物到达红外发射管和接收管中间时,会产生不同的高低电平,单片机采集此信号,控制灯的开关状态。红外发射管和接收管采用屏蔽的方式来消除外界的干扰。

图6 红外收发传感器判断交通情况原理框图及红外接收发射电路。
2.4 环境明暗变化检测与故障检测电路
采用光敏电阻实现对其明暗的变化,产生不同的电压,经单片机内部模数转换处理,根据检测的信号进行相应的处理,实现因环境变化而改变LED 灯的开关状态。其原理图如图7 所示。

图7 环境明暗变化检测与故障检测电路。
3 系统软件设计
系统的软件采用C 语言编程,软件开发采用新华龙SiliconLaboratories IDE 软件平台进行调试。为了编写和调试的方便,节省资源,程序使用模块化设计,根据各功能要求分别设计程序,大大简化了程序的设计和调试工作,节省设计周期。
3.1 系统主程序
主程序开始工作在一个等待设定状态,当有键按下时系统根据按键模式工作。本系统采用红外遥控控制,利用定时器中断来实现对其解码。程序根据设定的模式工作,当遇到特殊情况会自动控制路灯的开关状态。主程序流程图如图8 所示。
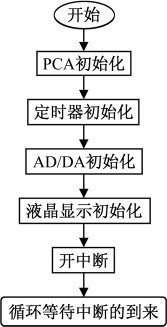
图8 主程序流程图。
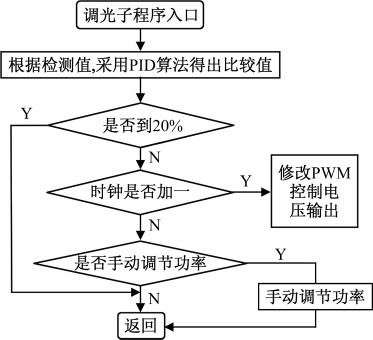
3.2 功率调节子程序
功率调节子程序流程图如图9 所示。程序首先通过PID 算法比较判断检测值的大小是否到20%,如果不够,时钟信号加1,同时修改PWM 控制电压输出。
若时钟信号不加1,就要考虑是否需要手动调节功率。
图9 功率调节子程序流程图。
4 系统测试
4.1 开关控制功能测量
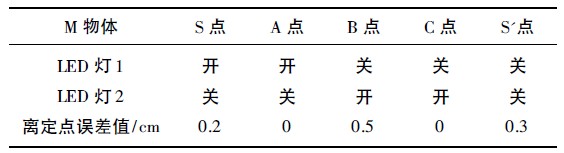
( 1) 交通情况自动调节测试。
交通情况自动调节测试如表1 所示。测试结果表明能自动调节LED 灯1 及LED 灯2 的开关,且可移动物体M 上定位点与过"亮灯状态变换点"( S、B、S' 等点) 垂线间的距离≤2 cm.
表1 交通情况自动调节测试。
( 2) 开关灯定时测试。
设定LED 灯1 及LED 灯2 同时开( 17: 00) ,LED灯1 及LED 灯2 同时关( 17: 10) ; 设定LED 灯1 及LED 灯2 分别在不同时间开关( LED 灯1 于18: 00 开,LED 灯2 于18: 10 开; LED 灯1 于9: 00 关,LED 灯2于9: 10 关) .开关灯定时测试如表2 所示。
表2 开关灯定时测试
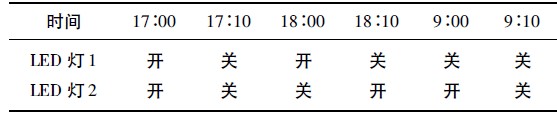
上表可见系统存在误差,误差产生是由于电路本身时钟有误差,还有人为的读数误差。
( 3) 环境明暗变化自动开关灯测试。
明暗变化自动开关灯测试,测试结果表明: 当环境变暗时,自动开启灯,当环境变亮时,自动关灯。
4.2 恒流源输出功率测试
表3 是在恒流源带LED 负载,调节控制电压时的实测电流值。
表3 LED 灯恒流驱动电路测试数据
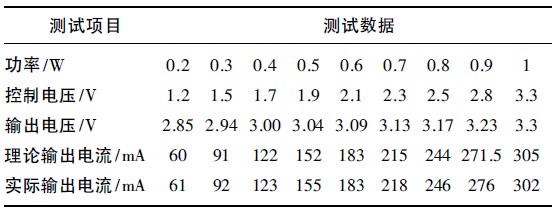
从测试结果可以看出,电流源的恒流精度达到了98.7%,输出功率精度变化小于2%,基本技术指标达到设计要求。
5 结论
通过综合测试,本模拟路灯控制系统实现了自主设定显示开关灯时间,控制整条支路按时开灯和关灯,并根据环境明暗的变化及交通情况自动控制调节灯的亮度和开关; 当路灯出现故障时,支路控制器发出滴答的报警信号,并显示有故障灯的编号。整个系统完全自给自足,使用外围器件少,软件编程方便灵活,系统调试简单方便,系统成本低,性价比高,具有较高的现实意义。