焊接机器人是在工业机器人基础上发展起来的先进焊接设备,由于焊接过程中,工件有加工误差、热变形、定位误差等各种影响因素,导致焊接质量下降,为保证焊接的可靠性,必须要进行焊缝的自动跟踪。核心是开发离性能的传感器和有效的控制方法,近年来,CCO传感器和旋转电弧传感器已成为两大主流传感器;模糊控制和及其与神经网络、PIO结合的智能控制方法已成为主要的控制方法。
焊接电源和信号的检测及相关的控制部件组成电弧传感系统,包括焊炬、直流焊接电源、霍尔电流传感器、AID采样器件、滤波和转速控制电路。它是整个系统的关键,完成测位、旋转伺服控制和电流采样的功能。为了确定焊炬旋转时所处的位置及旋转速度,在旋转电机中装有一个同铀的光电码盘,其外圈有64个矩形槽、内圈有1个矩形槽,当电机运转时,矩形槽交替地阻挡和允许从光电管中的发光管通往光敏接受管的光路,光敏管输出脉冲信号,反映旋转的瞬时位置,用作AID 采样的触发脉冲。旋转电机的控制一般采用PWM方式,具体的实现分为数字式和模拟式两种。文献1中通过DSP进行数字处理,计算出相应的控制量后输出到 OAC7625,A/0转换的结果经过隔离放大后控制PWM模块SG3525,这是一种数字式的控制方法,此外也有采用单片机的HSO或EPA的高速输出功能,通过驱动及光电隔离电路完成电压等级的转换后对电机进行转速控制。
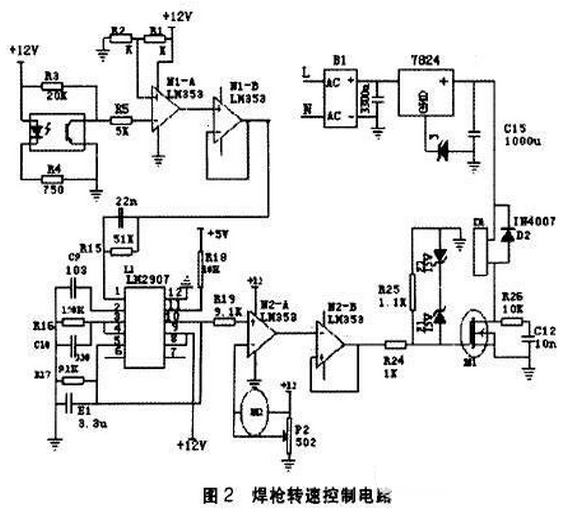
采用的是图2所示的模拟电路的方法,原理是:焊炬旋转的速度信号经隔离放大后,送入LM2907进行频率/电压转换,其输出为一个与转速相对应的锯齿波。此信号和调速旋钮来的设定值分别输入放大器的负、正输入端,输出的是PWM电压,实现对场效应管IRE540的控制。